
Tricopter – część 2
W pierwszej części relacji z budowy Tricoptera pisałem głównie o mechanice. W dodatku natomiast opisałem, co zrobiłem źle w pierwszej części (i to warto przeczytać) 🙂
Nadszedł czas, żeby skończyć budowę.
Wbrew mojemu odczuciu, że w pierwszej części zrobiłem już większość, to druga część zabrała mi jednak więcej czasu.
Przygotowanie i podłączenie regulatorów silników
Do tricoptera kupiłem najtańsze regulatory jakie można było dostać 🙂 :Hobbyking SS Series 15-18A
Tanie nie znaczy złe, zwłaszcza z odpowiednim oprogramowaniem 🙂 Przy odrobinie elektronicznych zdolności można do tych regulatorów wgrać dedykowane ’kopterowe’ oprogramowanie (SimonK). Jeżeli jednak nie ma się takich zdolności, to za odrobinę więcej warto kupić coś z serii Turnigy Multistar.
Przeprogramowanie regulatorów softem SimonK opisałem już w moim poprzednim wpisie na blogu.
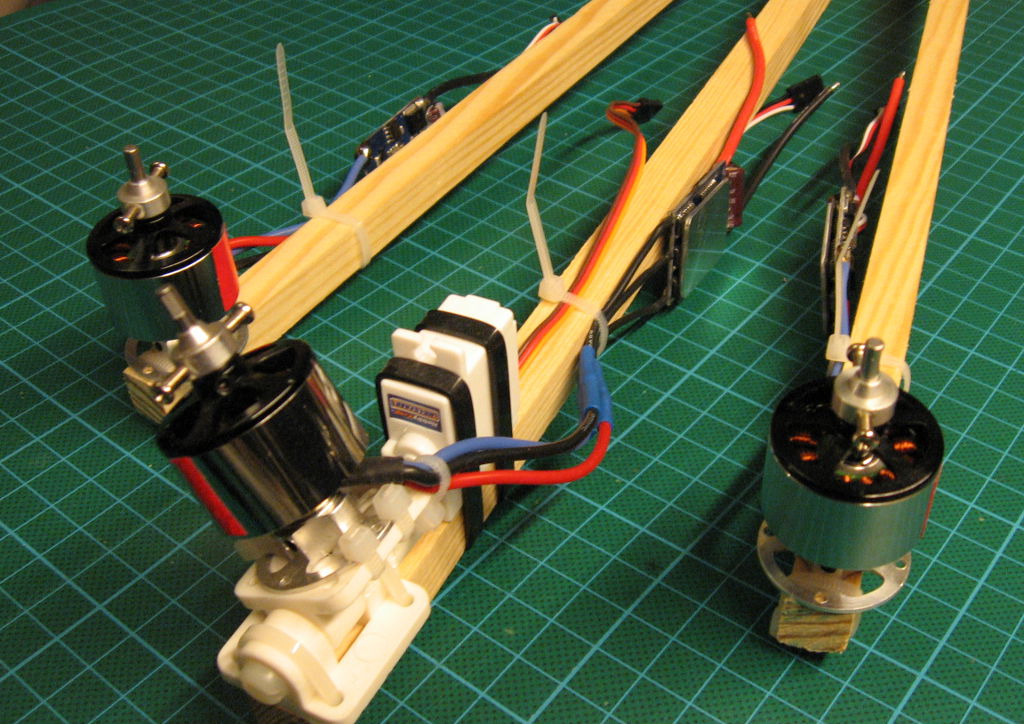
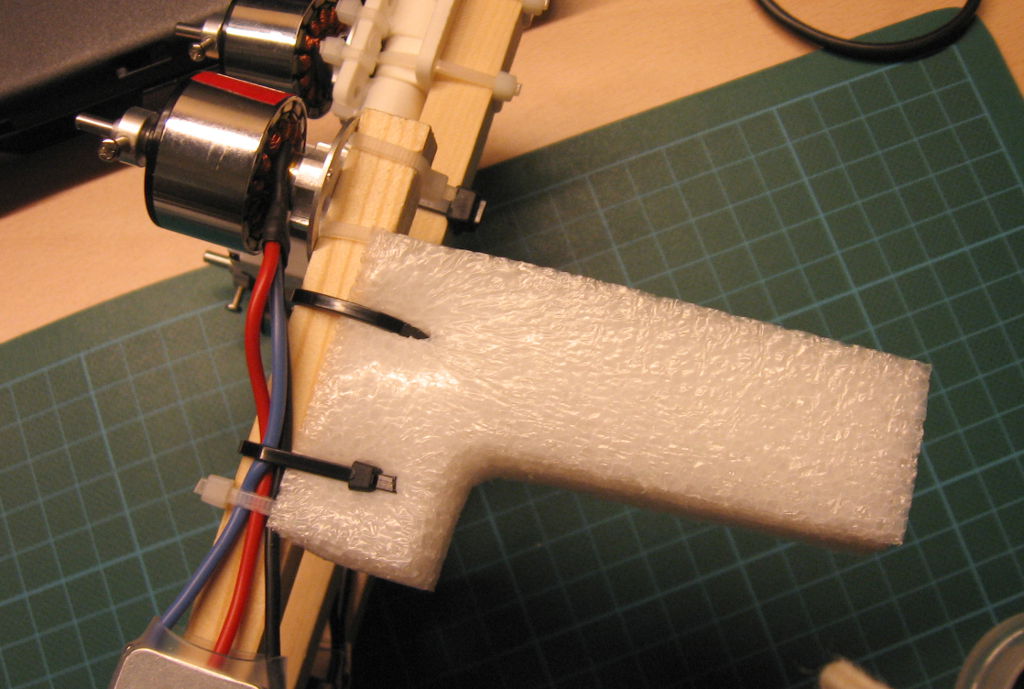
Na bocznych ramionach podłączyłem silniki bezpośrednio do regulatorów, usuwając oryginalne krótkie kabelki.
Na ogonie zostawiłem te kable, bo dłusze kable przy ruszającym się silniku mniej są narażone na zużycie. Przed przymocowaniem kabli do ogona należy upewnić się, że w każdej jej pozycji kable są luźne. Dodatkowo kable należy przymocować również do 'kołyski’, żeby nie poruszały się przy samym silniku.
Wyważanie silników i śmigieł
Mając regulatory podłączone do silników, ale jeszcze nie podłączone dalej, to dobra okazja do wyważenia silników i śmigieł,
Do tego przyda się prosty tester serw, ewentualnie można użyć nadajnika i odbiornika, ale robi się to bardziej skomplikowane 🙂
Na początek trzeba wyważyć silniki przy pomocy taśmy izolacyjnej lub 'trytytki’ 🙂 Jest sporo filmów na Youtube jak to zrobić, nawet przy użyciu lasera jak na filmie FliteTest-u :-).
Osobiście używam po prostu ręki, żeby wyczuwać wibracje. Wcześniej używałem telefonu z aplikacją Monitoring Drgań, ale myślę, że moja ręka jest czulsza 🙂
Jak już wiem po której stronie trzeba dodać wagi, to naklejam tam zwykłą naklejkę i zaczynam zabawę od nowa, Aż do uzyskania zadowalających efektów (albo znudzenia) 🙂
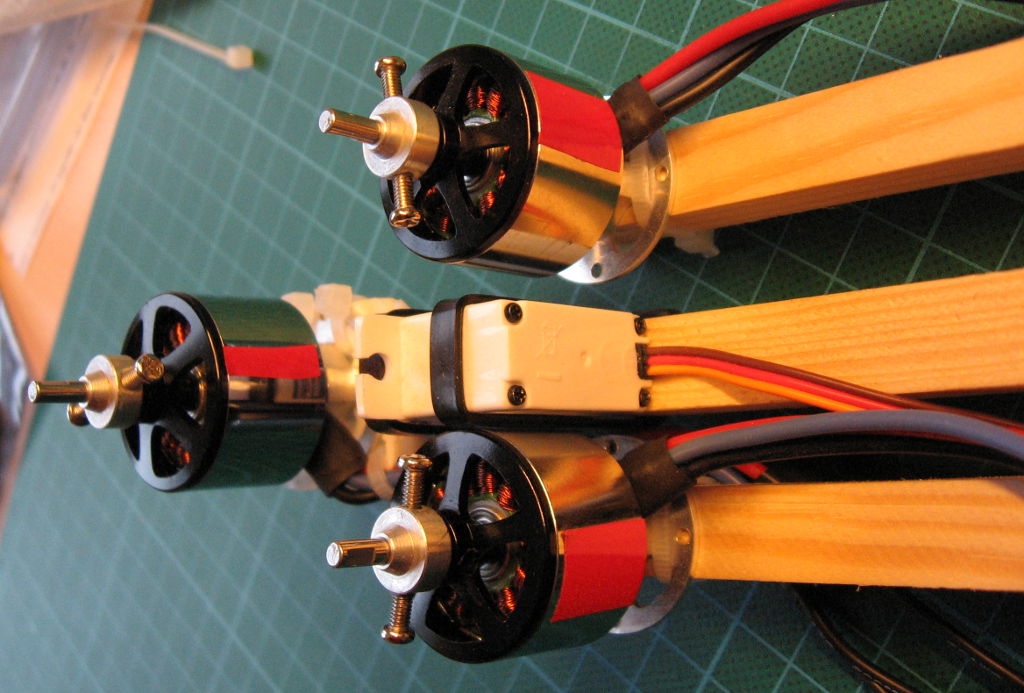
Moje silniki z naklejkami:
W następnym kroku trzeba (i to już obowiązkowo!) wyważyć śmigła.
Żeby dowiedzieć się na którą łopatę dodać wagi, używam znowu taśmy izolacyjnej. Gdy już wiem gdzie nakleić taśmę, kleję kawałem Scotch Magic Tape – chyba najlepsza taśma do takich celów.

Jak już jesteśmy przy śmigłach, używam oryginalnych śmigieł GWS 10×4.7 z najbliższego sklepu modelarskiego. Na początku uzywałem GWS RD-1047 z HobbyKing-a (takie same jak z lokalnego sklepu, tylko w innym kolorze), ale już ich tam nie ma.
Przez chwilę miałem również wizję, że jak dam jedno śmigło 'lewe’, to moment obrotowy do skompensowania będzie mniejszy i tylne śmigło będzie mniej pochylone. W tym duchu kupiłem śmigła 1047R Right Hand Rotation, ale wyszła z tego jakaś pomyłka – śmigła są bardzo miękkie i giętkie i raczej nie nadają się 'do pary’ ze zwykłymi GWS-ami 🙁
Mocowanie kamery i baterii
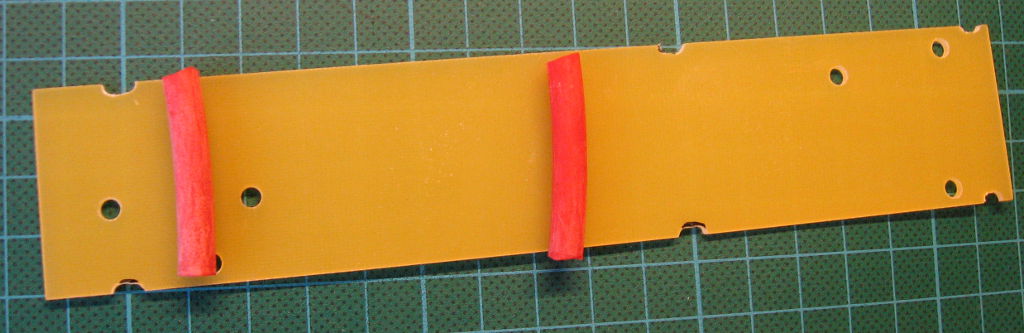
W swoich 'zasobach’ akurat miałem płytkę z laminatu o wymiarach zbliżonych do tego co powinno być, więc po prostu ją użyłem. Stąd też dziwne dziury w bezsensownych miejscach 🙂
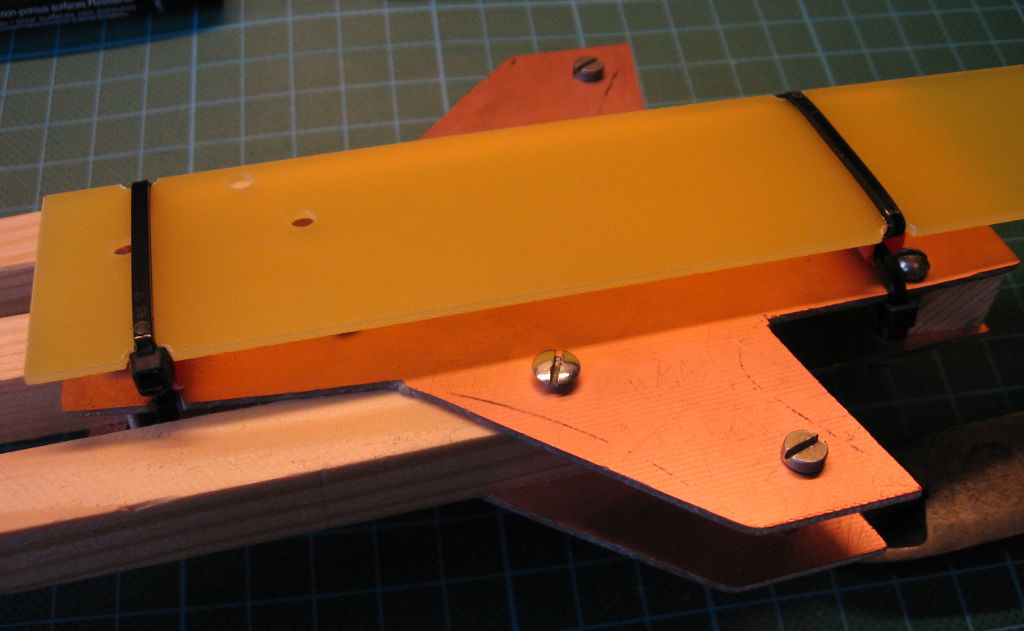
Pozostała tylko jedna rzecz do zrobienia: 6 nacięć po bokach. 4 nacięcia są pod opaski zaciskowe do mocowania do ramy, dwa dla łatwiejszego mocowania kamery.
Na poniższym zdjęciu widać też kawałki gumy jakiej użyłem jako pośredników w mocowaniu pomiędzy ramą, a płytką baterii:
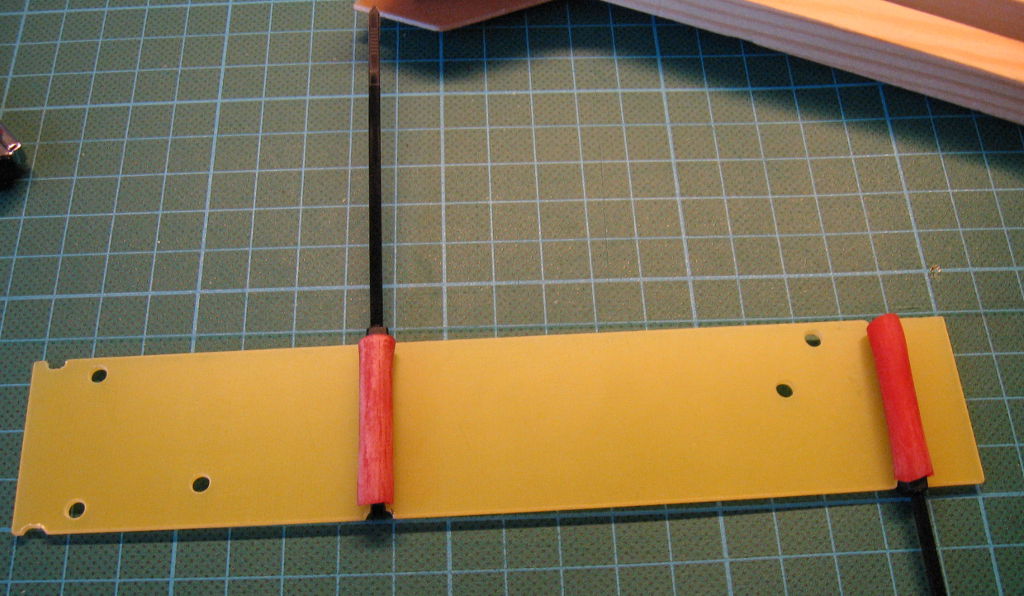
Podobne wyżłobienia zrobione na ramie:

Czas na przytwierdzenie płytki baterii do reszty Tricoptera:
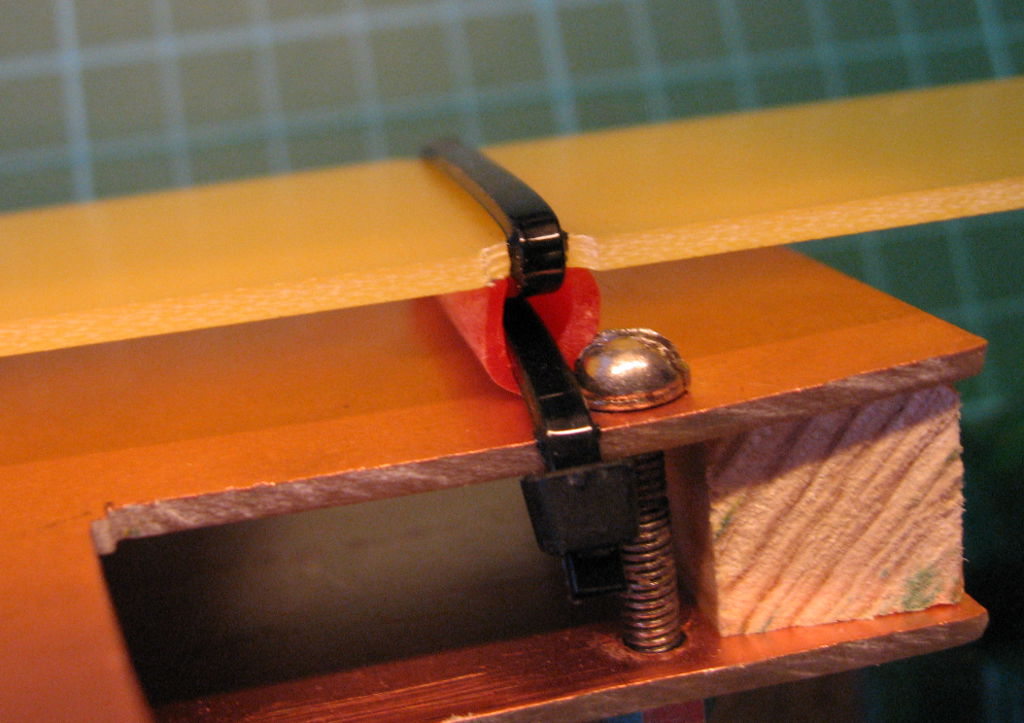
Na początku używałem opasek 2.5mm, ale są za słabe do tego celu (prawie każde lądowanie kończyło się zerwaniem). Teraz używam opasek 4.6mm (trochę ciasno wchodzą w gumkę, ale mieszczą się) i od tego czasu jest spokój (raz się zerwały przy upadku z kilkunastu metrów).
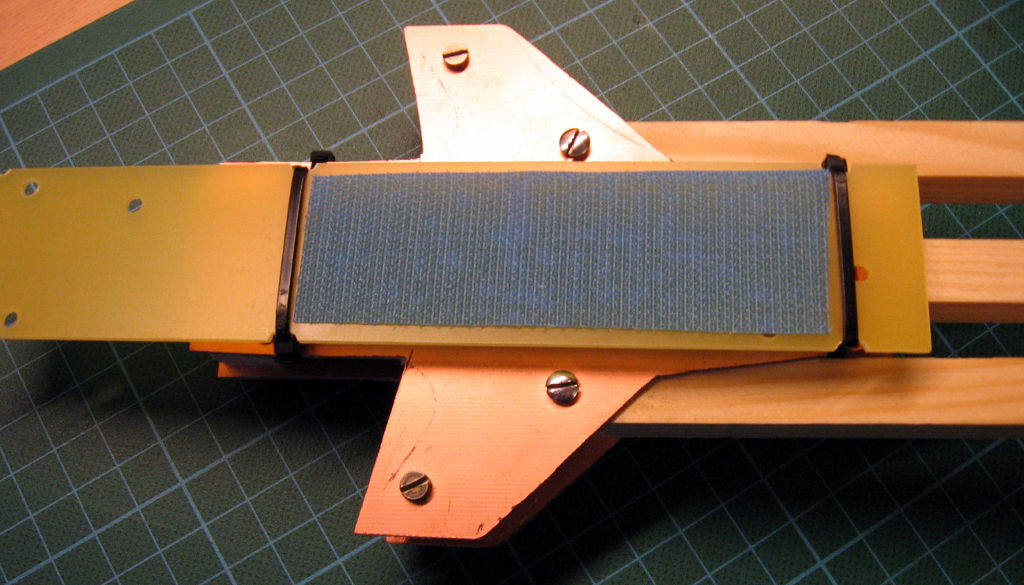
Na płytkę nakleiłem jeszcze rzepa, żeby bateria nie przesuwała się. Samą baterię mocuję jeszcze jednym dodatkowym rzepem.
Kable zasilające
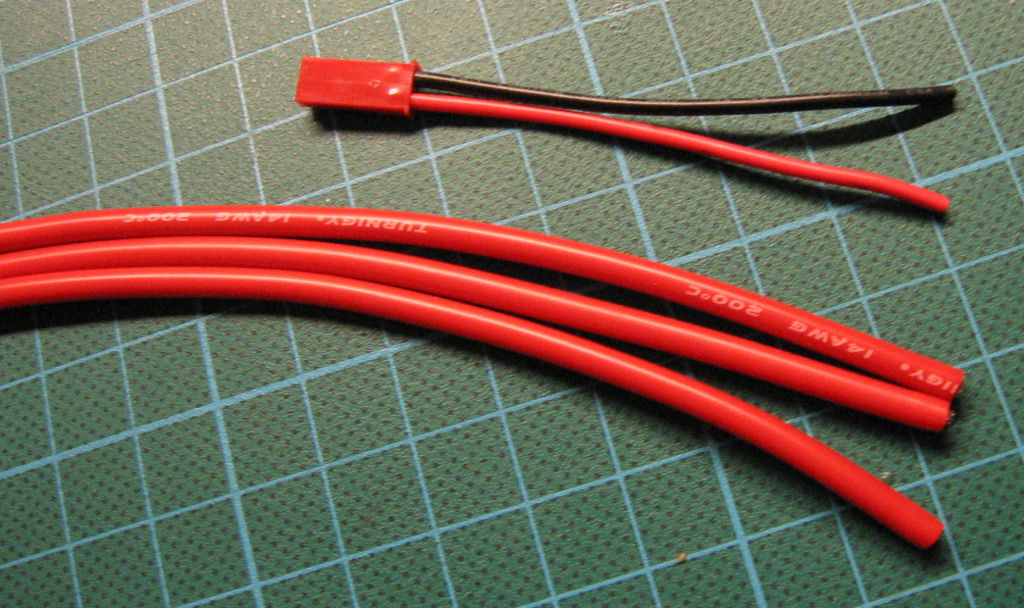
Mając pozdejmowane koszulki z regulatorów, usunąłem też od razu krótkie kable zasilające do nich i przylutowałem dłuższe i trochę grubsze w izolacji silikonowej (Turnigy Pure-Silicone Wire 14AWG czerwnone i czarne). 2 metry z każdego rodzaju wystarczają. Po tym można założyć nowe koszulki termokurczliwe na regulatory:
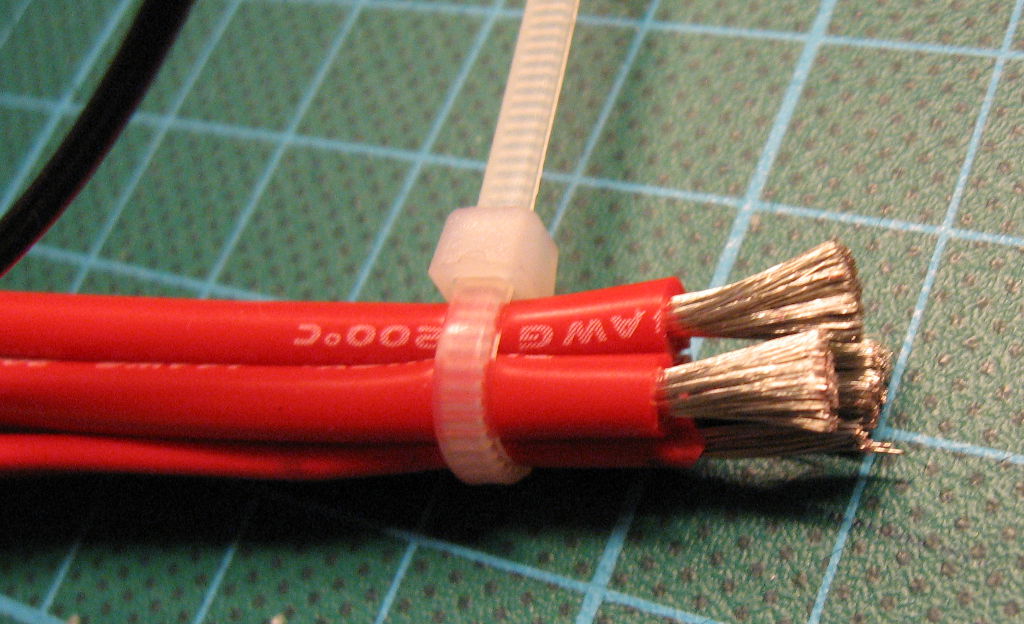
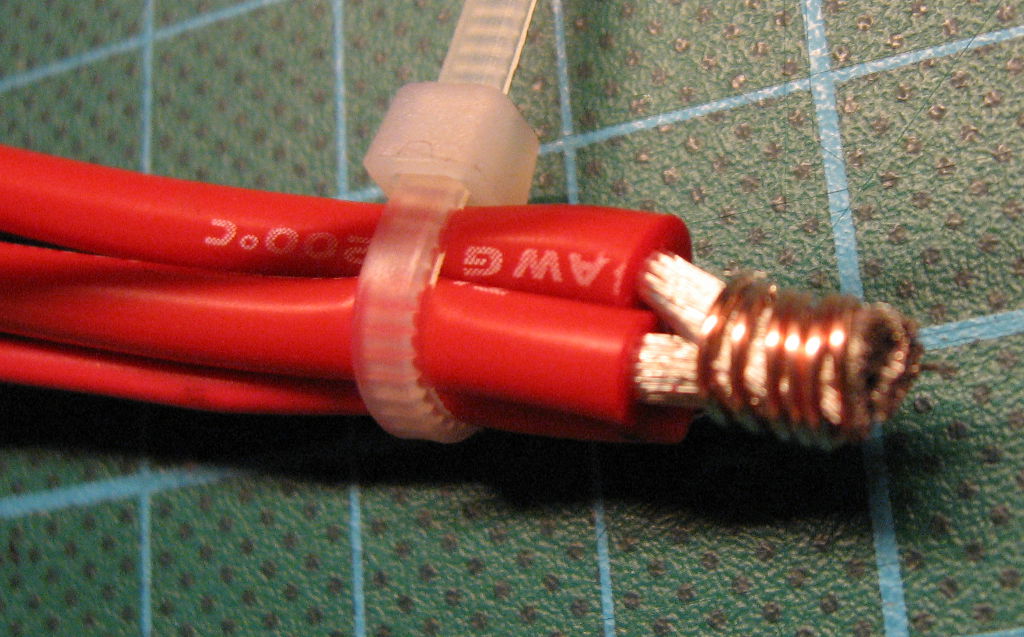
Lutowanie drugiego końca kabli nie jest proste, bo trzeba nie dość, że polutować je razem, to jeszcze całość przylutować do wtyczki. Na szczęście sposób opisany przez Davida świetnie się tu sprawdza: wziąć wszystkie końce kabli razem i owinąć je cienkim drutem przed lutowaniem. Ja dodatkowo jeszcze spiąłem tymczasowo kable 'trytytką’, co jeszcze bardziej ułatwia całą rzecz:
Teraz lutowanie jest już całkiem proste:
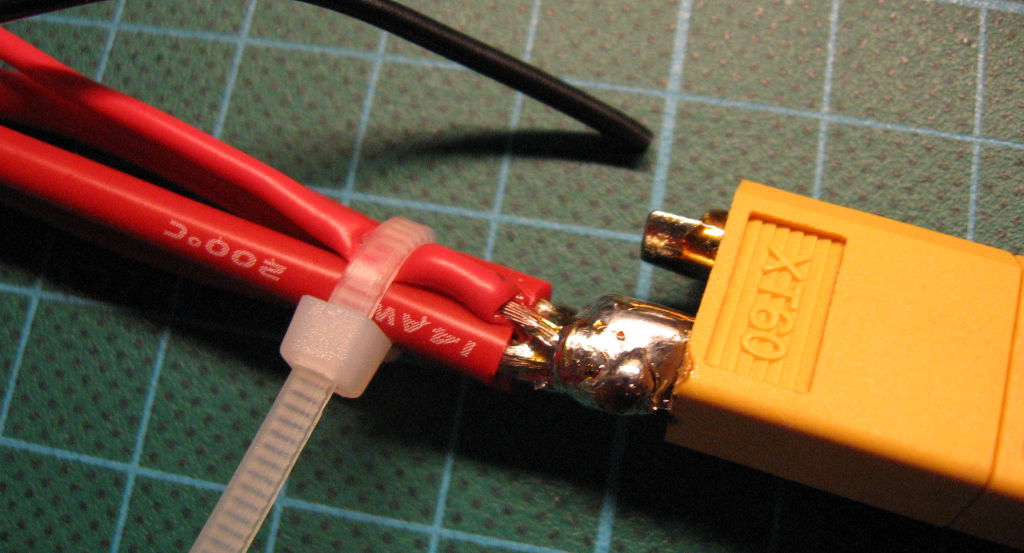
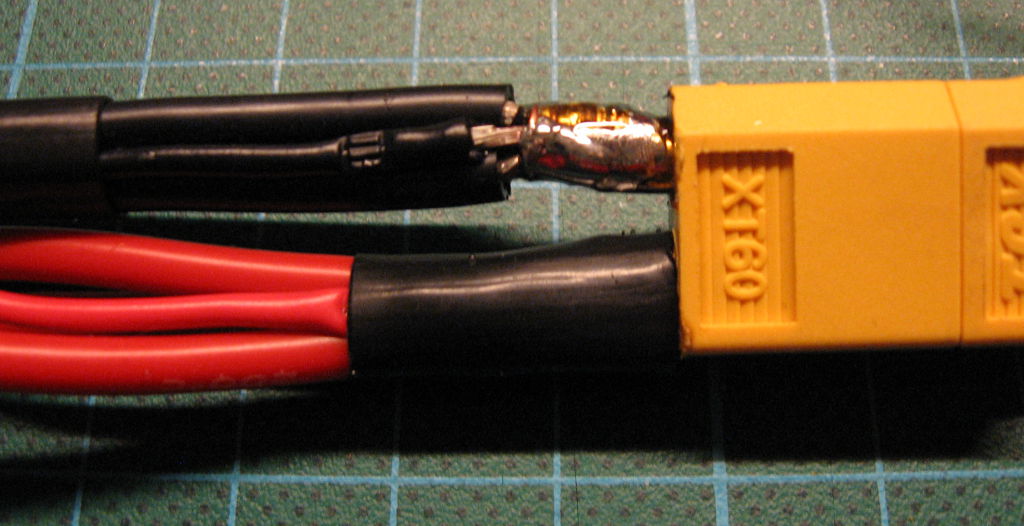
Gotowe połączenie z gniazdkiem:

Montaż kontrolera lotu (FC – flight controller)
Jakoś mi wyszło, że odległości pomiędzy ramionami z przodu, a ogonem mam różne. Kontroler (a najlepiej nawet czujniki na nim) powinien być umieszczony dokładnie w środku ciężkości. Ponieważ zmiana geometrii ma wpływ również na położenie środka ciężkości (CG), to trzeba było go wyznaczyć, bo ten z planów mógł być w złym miejscu.
Najprostszą metodą wyznaczenia CG dla trójkąta jest po prostu narysowanie go (w skali), po czym połączenie środków boków z przeciwległymi wierzchołkami. Przecięcie się tych linii będzie właśnie w środku ciężkości:
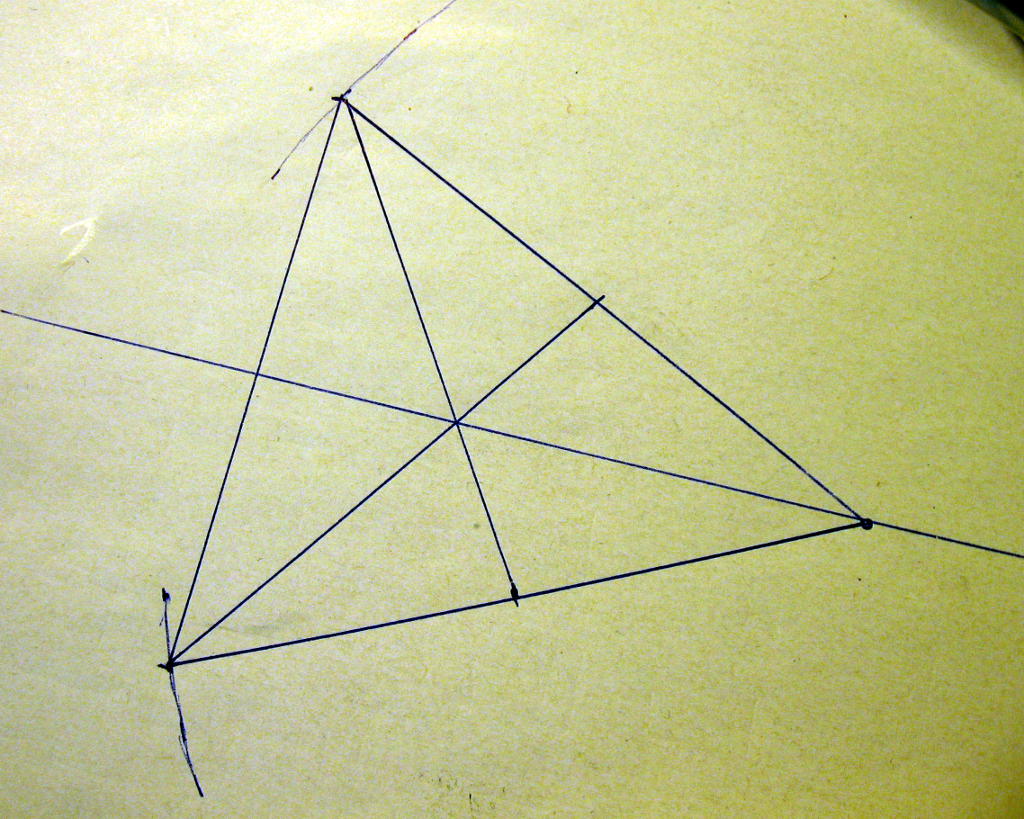
I w tym miejsci żegam się z instrukcją Davida i zaczynam swoją własną przygodę 🙂
David używa jako kontrolera lotu KK2.0 FC board, ale ta płytka ma tylko żyroskopy i akcelerometry, więc wybrałem tańszą ale z większą ilością czujników (oczywisty wybór 🙂 ): MultiWii 328P Flight Controller w/FTDI & DSM2 Port. Więcej o tej płytce pisałem już w moim wcześniejszym wpisie.
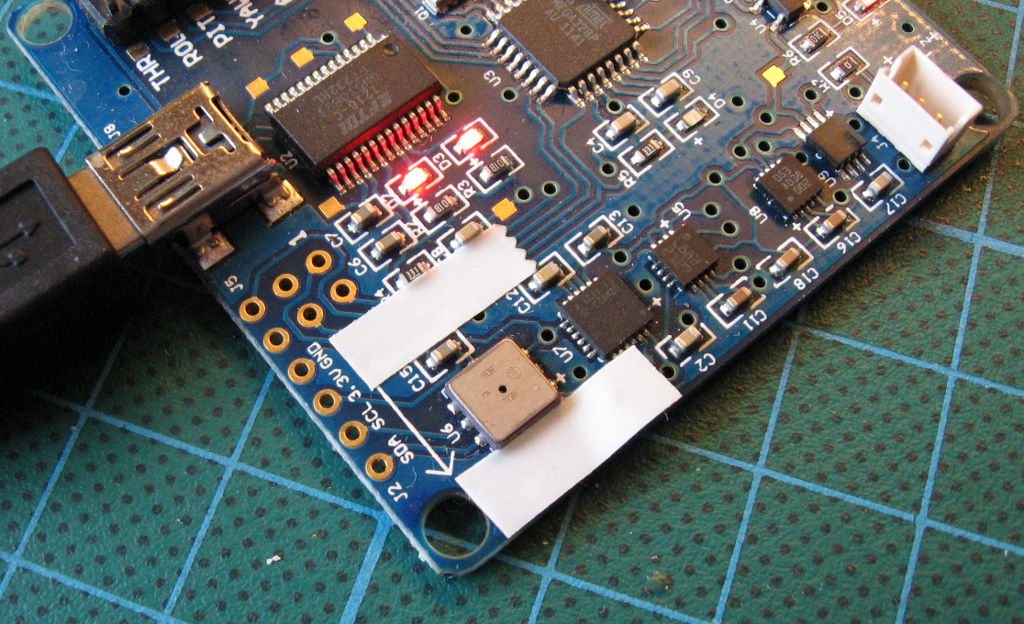
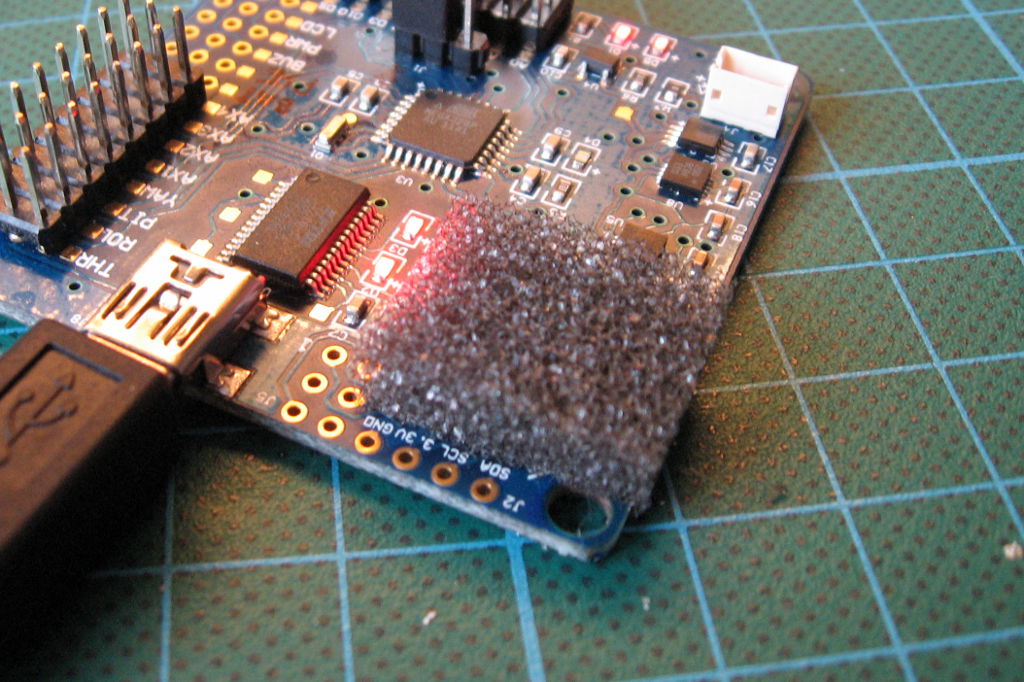
Pierwszą rzeczą jest zabezpieczenie barometru (wysokościomierza). Czujnik jest czuły na światło, dodatkowo powinien być odizolowany od wiartu, żeby odczyty były niezakłócone. Osłonę zrobiłem z kawałka gąbki przyklejonej na taśmę dwustronnie klejącą:
Do zamocowania kontrolera przygotowałem 3 nóżki 'antywibracyjne’ wycięte pianki:

Wszystko przyklejone przy pomocy silnej taśmy dwustronnie klejącej:
Podłączenie regulatorów do kontrolera
Każdy z użytych przeze mnie regulatorów ma również wbudowany stabilizator do zasilania elektroniki w modelu (popularnie BEC). Połączenie ich razem nie jest zbyt dobrzym pomysłem, zwłaszcza tak długimi kablami.
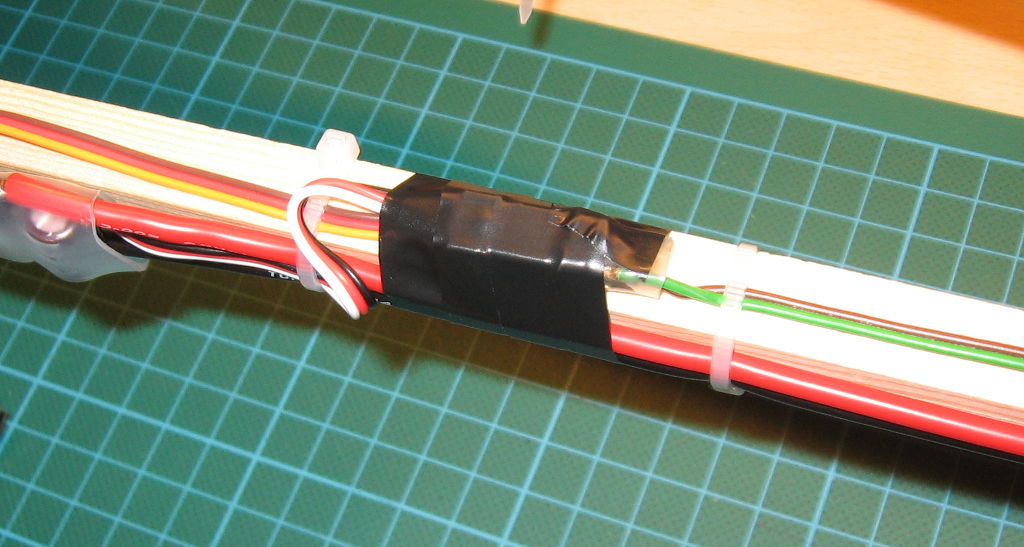
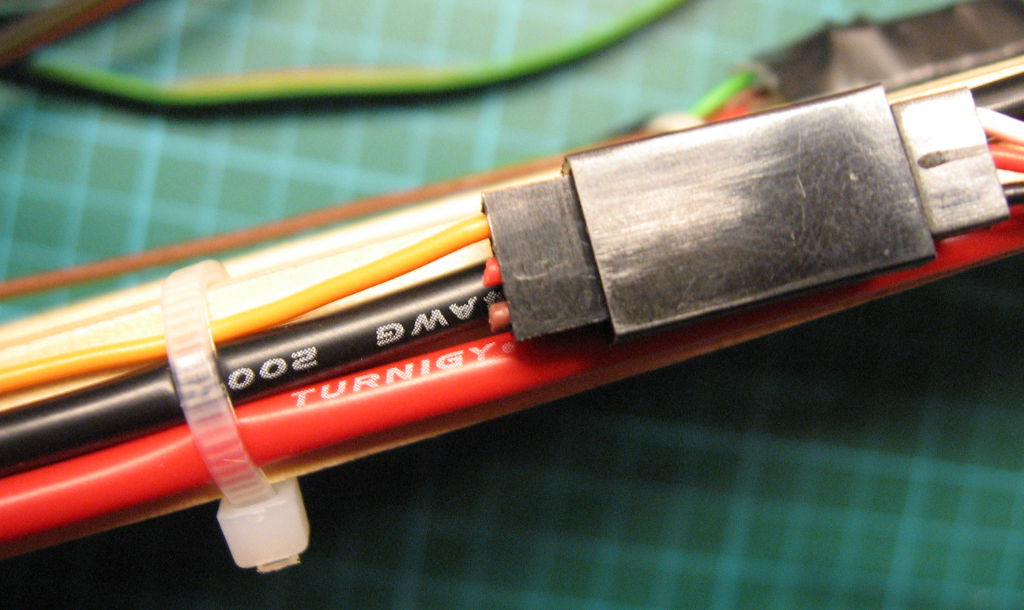
W takim razie, na ogonie BEC zasila tylko serwo. Do tego zrobiłem mały konektorek z goldpinów 2×3, gdzie połączyłem razem piny zasilania (+/-) i wyprowadziłem sygnały z regulatora i serwa do kontrolera. Bez masy (ta już jest podłączona grubym kablem), żeby uniknąć pętli mas.
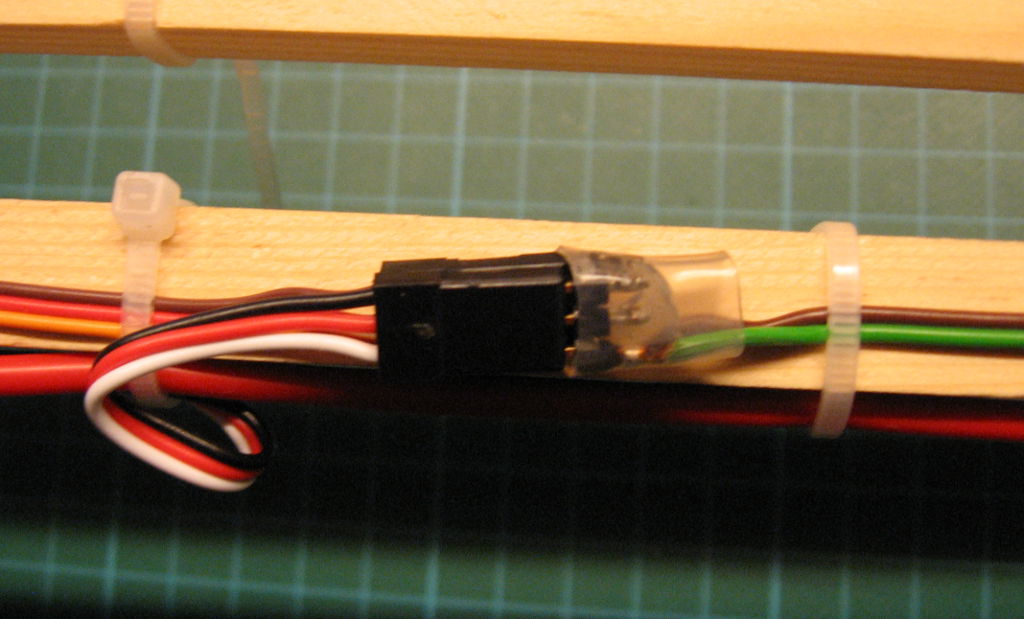
Każde złącze musi być również zabezpieczone przed rozłączeniem – wybrałem najprostszy sposób – taśma izolacyjna:
Na prawym ramieniu użyłem po prostu przedłużacza serw (30cm) i podłączyłem to do FC. W ten sposób kontroler jest zasilany z tego regulatora.
Na lewym ramieniu również użyłem przedłużacza serw, ale z obciętymi kablami zasilającymi. Teoretycznie można puścić po prostu jeden kabelek, ale wtyczki ze wszystkimi trzema pinami dają pewniejsze połączenie mechaniczne.
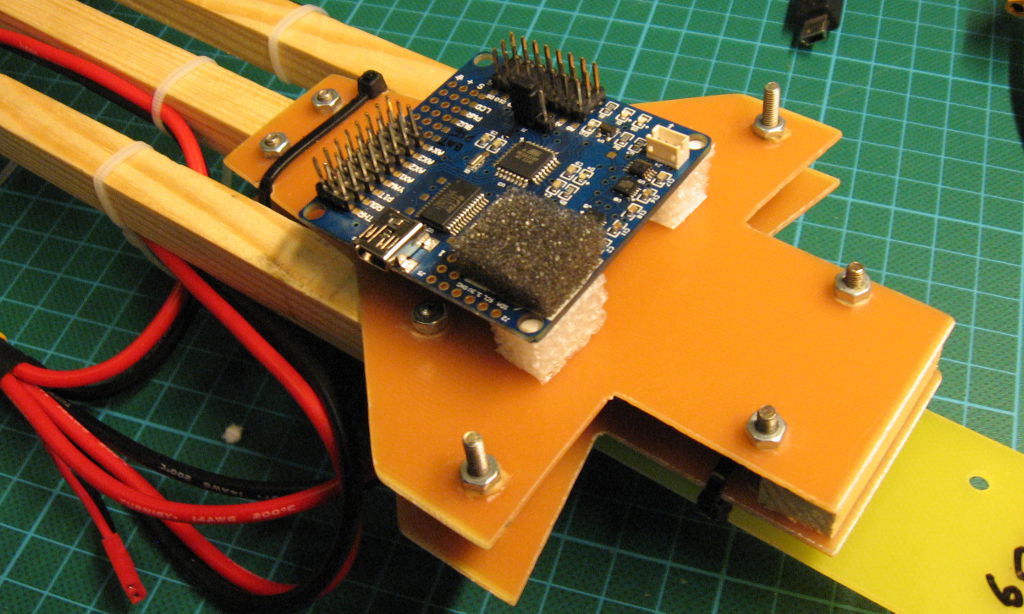
Całość podłączyłem do kontrolera wg, dokumentacji Multiwii i tabelki na mojej stronie z opisem tego FC:
- silnik na ogonie powinien być sterowany przez sygnał D9 w Arduino, czyli piny D9 lub BUZ w tym FC
- serwo na ogonie powinno być sterowane przez sygnał D3 w Arduino, czyli pin AX4 w tym FC
- lewy silnik powinien być sterowany sygnałem D11 w Arduino, czyli tu również pin D11
- prawy silnik powinien być sterowany sygnałem D10, tu tak samo
- sygnał z odbiornika powinien być podłączony do D2 w Arduino, czyli tutaj do THR. Mogę podłączyć tylko jeden kabel, bo używam odbiornika z wyjściem CPPM (FrSky D4R-II)
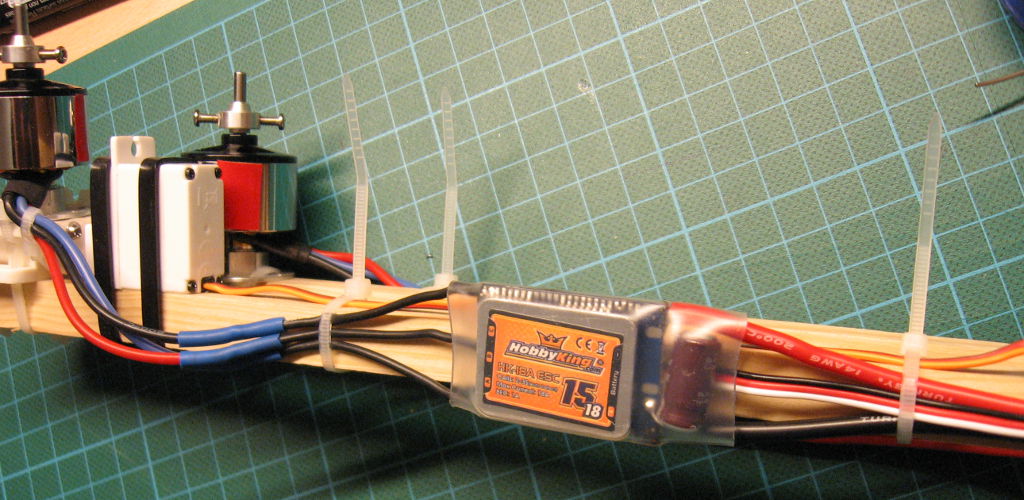
Wszystko popodłączane:
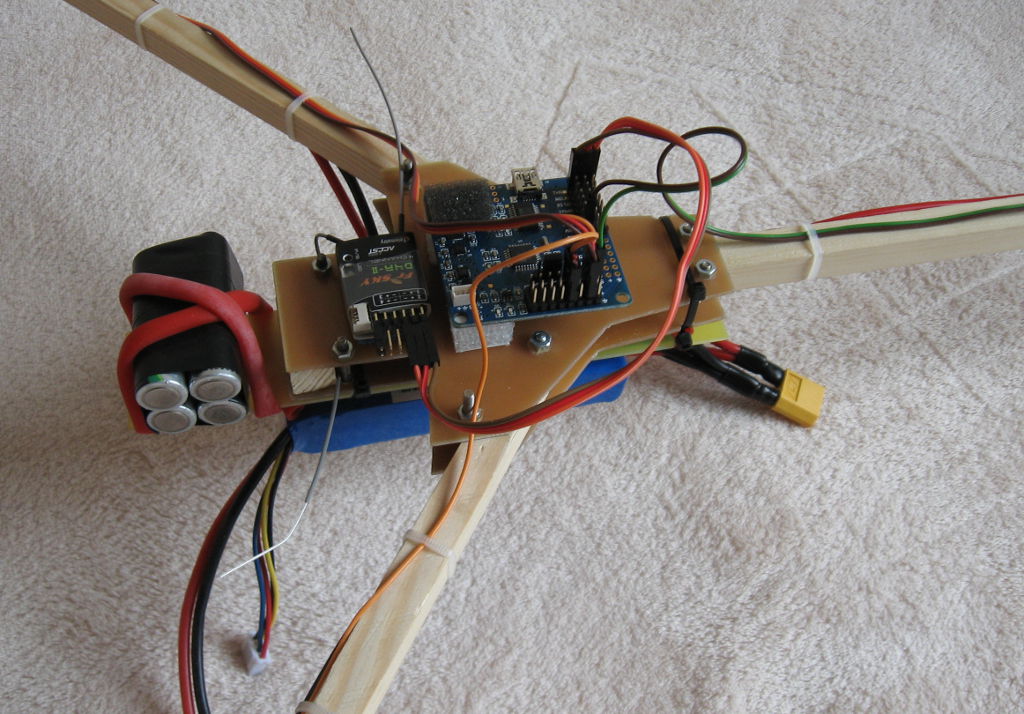
Na powyższym zdjęciu 4 baterie AA robią jako balast zamiast kanery GoPro – tak jest bezpieczniej na pierwsze loty 🙂
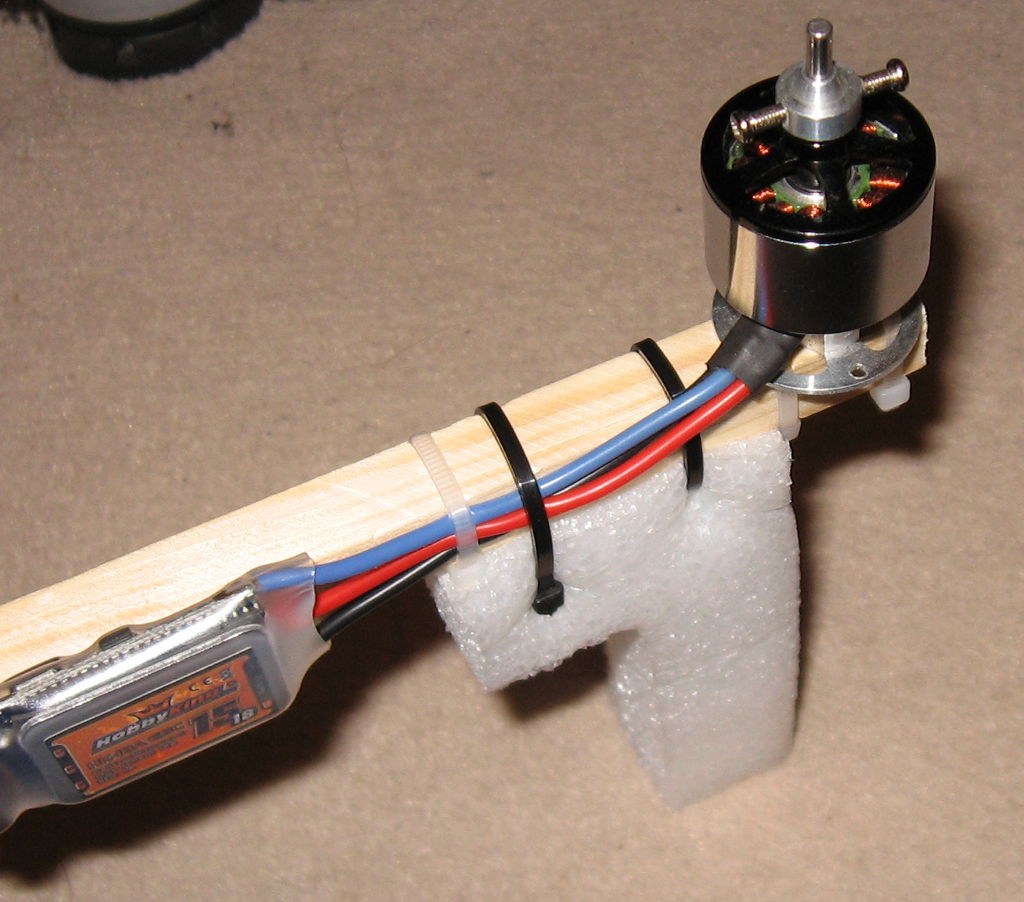
Nogi
Do nauki latania lepiej jak nogi będą sprężyste, żeby absorbować uderzenia. Czyli kolejne wykorzystanie pianki i 'trytytek’:

Gotowy na pierwszy lot
Do pierwszego lotu wystarczy:

Ciąg dalszy nastąpi…
Zajefajnie ciekawe
Czekam na ciąg dalszyy
Ciag dalszy na pewno będzie. Jako, że lata to już od dłuższego czasu, to będą to głównie doświadczenia z użytkowania (w tym rozbijania) i modyfikacje/ulepszenia. Tylko czasu trochę muszę znaleźć na opisanie tego wszystkiego.
Nice tricopter. I just started building and flying tricopters about a month ago. I’ve been reading your blog because I am going to try the same FC board. I prefer the KK2,but they are hard to come by,so I am going to try this board. I have some suggestions from my brief flying experience. Use connectors between your motor leads and your esc’s. That way if you crash and your motor breaks loose you won’t pull out the wires from your motors. Use zip ties on the esc side of the connectors,so the motor leads pull out during a crash. A very good build video is from Simplecopter. He builds and sells tricopters,T Copters,etc. His video’s give some good advise. Good luck with your Tricopter.